De collineariteitsvergelijkingen zijn een tweetal uitdrukkingen die de relatie aangeven tussen de coördinaten van een punt in een driedimensionaal coördinatenstelsel en de coördinaten van het beeldpunt ervan bij centrale projectie op een beeldvlak, zoals bij een camera. De vergelijkingen zijn een meetkundig gevolg van de projectiemethode.
De vergelijkingen worden gebruikt in alle gebieden van de optica en de optische beeldregistratie, zoals de optische metingen bij geodesie en fotogrammetrie. Meestal wordt bij deze metingen teruggerekend van het geregistreerde beeld naar de coördinaten van het waargenomen punt. Beeldpunt, projectiecentrum en objectpunt liggen in het ideale geval op een lijn, zijn collineair, maar in de praktijk ontstaan door het gebruik van een of meer lenzen afwijkingen van de ideale situatie.
Als de driedimensionale coördinaten van een objectpunt bekend zijn, kunnen de coördinaten van het beeldpunt bij bekende camerapositie worden berekend.
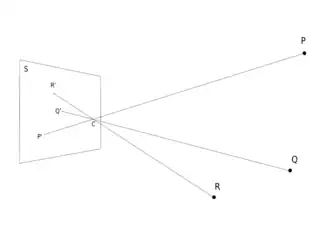
Lichtstralen vallen door de opening van een camera obscuraDe punten en worden geprojecteerd op het beeldvlak via het projectiecentrum - en -as bij de projectie van via het projectiecentrum
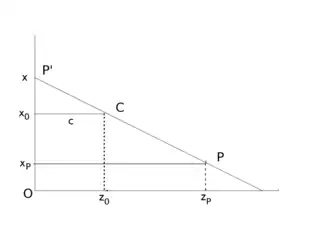
Laat een coördinatensysteem zijn met de - en -as in het beeldvlak. Het punt wordt door centrale projectie op het beeldvlak afgebeeld. Het af te beelden punt heeft in dit systeem de coördinaten , het beeld van de coördinaten en , en het projectiecentrum de coördinaten . Bij centrale projectie is er eenzelfde verhouding tussen de overeenkomende driehoekszijden
en ,
en,
en
en ,
waarin de afstand is van het projectiecentrum tot het beeldvlak.
Dus:
Oplossen van uit de laatste vergelijking en substitutie in de beide andere leidt tot de relaties:
Het punt is gewoonlijk bepaald door de coördinaten en , in een of ander coördinatensysteem 'buiten' de camera. Het projectiecentrum heeft in dit systeem de coördinaten . Het systeem kan door een transformatie in het systeem van de camera worden overgevoerd. Dat gaat door middel van een rotatie en een translatie. Door de translatie veranderen de verschillen van de gelijknamige coördinaten niet en de rotatie of cameratransformatie wordt beschreven door een 3×3-matrix, die overvoert in:
en
Substitutie van deze uitdrukkingen geeft twee vergelijkingen, die collineariteitsvergelijkingen worden genoemd: